
Update (28/01/2020): open dataset, available for download!
In this tutorial, we will see how to train and apply a deep neural network on real world remote sensing images, using only user-oriented open-source software. No coding skills required!
Data
Our “Tokyo dataset” is freely available. It is composed as follow:
-
- One Sentinel-2 image, that can be downloaded from the European Space Agency hub or from your preferred Sentinel access portal. Just download the Sentinel-2 image acquired over the city of Tokyo the 2019/05/08 (Mission: Sentinel-2, Platform: S2A_*) named S2A_MSIL2A_20190508T012701_N0212_R074_T54SUE_20190518T165701.
- Two label images of terrain truth (one for training and one for validation). Each pixel is either a “no-data” value (255) or a class value (starting from 0). The files can be downloaded here (also provided: the style .qml file for QGIS). This dataset has been elaborated for educational purpose at our research facility, using Open Street Map data.
Goal
We want to classify the Sentinel-2 image, meaning that we intend to estimate the class for each pixel. Since our terrain truth data is sparsely annotated, our approach consist in training a network that estimates one single class value for a particular patch of image. If we had a densely annotated dataset, we could have used the semantic segmentation approach, but this will be another story (soon on this blog!).
We will use the OTBTF remote module of the Orfeo ToolBox. OTBTF relies on TensorFlow to perform numeric computations. You can read more about OTBTF on the blog post here.
It is completely user-oriented, and you can use the provided applications in graphical user interface as any Orfeo ToolBox applications. Concepts introduced in OTBTF are presented in [1]. The easiest way to install and begin with OTBTF is to use the provided docker images.
Deep learning backgrounds
To goal of this post is not to do a lecture about how deep learning works, but quickly summarizing the principle!
Deep learning refers to artificial neural networks with deep neuronal layers (i.e. a lot of layers !). Artificial neurons and edges typically have parameters that adjust as learning proceeds.
Weights modify the strength of the signal at a connection. Artificial neurons may output in non linear functions to break the linearity, for instance to make the signal sent only if the aggregate signal crosses a given threshold. Typically, artificial neurons are aggregated into layers. Different layers may perform different kinds of transformations on their inputs. Signals travel from the first layer (the input layer), to the last layer (the output layer), possibly after traversing the layers multiple times. Among common networks, Convolutional Neural Networks (CNN) achieve state of the art results on images. CNN are designed to extract features, enabling image recognition, object detection, semantic segmentation. A good review of deep learning techniques applied to remote sensing can be found here [2]. In this tutorial, we focus only on CNN for a sake of simplicity.
Let’s start
During the following steps, we advise you to use QGIS to check generated geospatial data. Note that applications parameters are provided in the form of command line, but can be performed using the graphical user interface of OTB!
We can decompose the steps that we will perform as follow:
-
- Sampling: we extract patches of images associated to the terrain truth,
- Training: we train the model from patches,
- Inference: Apply the model to the full image, to generate a nice landcover map!
Normalize the remote sensing images
We will stack and normalize the Sentinel-2 images using BandMathX. We normalize the images such as the pixels values are within the [0,1] interval.
# Go in S2 folder
cd S2A_MSIL2A_20190508T012701_N0212_R074_T54SUE_20190508T041235.SAFE
cd GRANULE/L2A_T54SUE_A020234_20190508T012659/IMG_DATA/R10m/
# Apply BandMathX
otbcli_BandMathX \
-il T54SUE_20190508T012701_B04_10m.jp2 \
T54SUE_20190508T012701_B03_10m.jp2 \
T54SUE_20190508T012701_B02_10m.jp2 \
T54SUE_20190508T012701_B08_10m.jp2 \
-exp "{im1b1/im1b1Maxi;im2b1/im2b1Maxi;im3b1/im3b1Maxi;im4b1/im4b1Maxi}" \
-out Sentinel-2_B4328_10m.tif
Sampling the remote sensing images
The first step to apply deep learning techniques to real world datasets is sampling. The existing framework of OTB offers great tools for pixel wise or object oriented classification/regression tasks. On the deep learning side, nets like CNNs are trained over patches of images rather than batches of single pixel. Hence the first application of OTBTF we will present targets the patches sampling and is called PatchesExtraction.
The PatchesExtraction application integrates seamlessly in the existing sampling framework of OTB. Typically, we have two options depending if our terrain truth is vector data or label image.
-
- Vector data: one can use the PolygoncClassStatistics (computes some statistics of the input terrain truth) and SampleSelection applications to select patches locations, then give them to the PatchesExtraction application.
- Label image: we can directly use the LabelImageSampleSelection application from the OTBTF to select the patches locations.
In our case, we have terrain truth in the form of a label image. We hence will use option 2. Let’s select 500 samples for each classes with the command line below:
# Samples selection for group A
otbcli_LabelImageSampleSelection \
-inref ~/tokyo/terrain_truth/terrain_truth_epsg32654_A.tif \
-nodata 255 \
-outvec terrain_truth_epsg32654_A_pos.shp \
-strategy "constant" \
-strategy.constant.nb 500Where :
- inref is the label image,
- nodata is the value for “no-data” (i.e. no annotation available at this location),
- strategy is the strategy to select the samples locations,
- outvec is the filename for the generated output vector data containing the samples locations.
Repeat the previously described steps for the second label image (terrain_truth_epsg32654_B.tif). Open the data in QGIS to check that the samples locations are correctly generated.
Patches extraction
Now we should have two vector layers:
terrain_truth_epsg32654_A_pos.shpterrain_truth_epsg32654_B_pos.shp
It’s time to use the PatchesExtraction application. The following operation consists in extracting patches in the input image, at each location of the terrain_truth_epsg32654_A_pos.shp. In order to train a small CNN later, we will create a set of patches of dimension 16×16 associated to the corresponding label given from the class field of the vector data. Let’s do this :
# Patches extraction
otbcli_PatchesExtraction \
-source1.il Sentinel-2_B4328_10m.tif \
-source1.patchsizex 16 \
-source1.patchsizey 16 \
-source1.out Sentinel-2_B4328_10m_patches_A.tif \
-vec terrain_truth_epsg32654_A_pos.shp \
-field "class" \
-outlabels Sentinel-2_B4328_10m_labels_A.tif uint8Where:
- source1 is first image source (it’s a parameter group),
- source1.il is the input image list of the first source,
- source1.patchsizex is the patch width of the first source,
- source1.patchsizey is the patch height of the first source,
- source1.out is the output patches image of the first source,
- vec is the input vector data of the points (samples locations),
- field is the attribute that we will use as the label value (i.e. the class),
- outlabels is the output image for the labels (we can force the pixel encoding to be 8 bits because we just need to encore small positive integers).
After this step, you should have generated the following output images, that we will name “the training dataset”:
Sentinel-2_B4328_10m_patches_A.tifSentinel-2_B4328_10m_labels_A.tif
Trick to check the extracted patches from QGIS : Simply open the patches as raster layer, then chose the same coordinates reference system as the current project (indicated on the bottom right of the window).
Repeat the previously described steps for the vector layer terrain_truth_epsg32654_B_pos.shp and generate the patches and labels for validation. After this step, you should have the following data that we will name “the validation dataset” :
Sentinel-2_B4328_10m_patches_B.tifSentinel-2_B4328_10m_labels_B.tif
Side note on pixel interleave: sampled patches are stored in one single big image that stacks all patches in rows. There is multiple advantages to this. In particular, accessing one unique big file is more efficient than working on thousands of separate small files stored in the file system. The interleave of the sampled source is also preserved, which, guarantee good performance during data access.
Training
How to train a deep net ? To begin with something easy, we will train a small existing model. We focus on a CNN that inputs our 16 × 16 × 4 patches and produce the prediction of an output class among 6 labels ranging from 0 to 5.
Basics
Here is a quick overview of some basic concepts about the training of deep learning models.
Model training usually involves a gradient descent (in the network weights space) of a loss function that typically expresses the gap between estimated and reference data. The batch size defines the number of samples that will be propagated through the network for this gradient descent. Supposing we have N training samples and we want to use a batch size of n. During learning, the first n samples (from 1 to n) will be used to train the network. Then, the second n samples (from n+1 to 2n) will be used to train the network again. This procedure is repeated until all samples are propagated through the network (this is called one epoch).
Model guts
We propose to introduce a small and simple CNN to better understand the approach. This section describe what is inside this model. The figure below summarizes the computational graph of our CNN.
Input : The image patches fed the placeholder named “x” in the TensorFlow model. The first dimension of “x” might have any number of components. This dimension is usually employed for the batch size, and isn’t fixed to enable the use of different batch size. For instance, assuming we want to train our model with a batch of 10 samples, we will fed the model a multidimensional array of size 10 × 16 × 16 × 4 in the placeholder “x” of size # × 16 × 16 × 4.
Deep net : “x” is then processed by a succession of 2D-Convolution/Activation function (Rectified linear)/Pooling layer. After the last activation function, the features are processed by a fully connected layer of 6 neurons (one for each predicted class).
Predicted class : The predicted class is the index of the neuron (from the last neuron layer) that output the maximum value. This is performed in processing the outputs of the last fully connected layer with the Argmax operator, which is named “prediction” in the graph.
Cost function : The goal of the training is to minimize the cross-entropy between the data distribution (real labels) and the model distribution (estimated labels). We use the cross-entropy of the softmax of the 6 neurons as a cost function. In short, this will measure the probability error in the discrete classification task in which the classes are mutually exclusive (each entry is in exactly one class). For this, the model implements a function of TensorFlow know as Softmax cross entropy with logits. This function first computes the Softmax function of the 6 neurons outputs. The softmax function will normalize the output such as their sum is equal to 1 and can be used to represent a categorical distribution, i.e, a probability distribution over n different possible outcomes. The Shannon cross entropy between true labels and probability-like values from the softmax is then computed, and considered as the loss function of the deep net.
Optimizer : Regarding the training, a node called “optimizer” performs the gradient descent of the loss function : this node will be used only for training (or fine tuning) the model, it is useless to serve the model for inference ! The method implemented in this operator is called Adam (like “Adaptive moment estimation” [3]). A placeholder named “lr” controls the learning rate of the optimizer : it holds a single scalar value (floating point) and can have a default value.
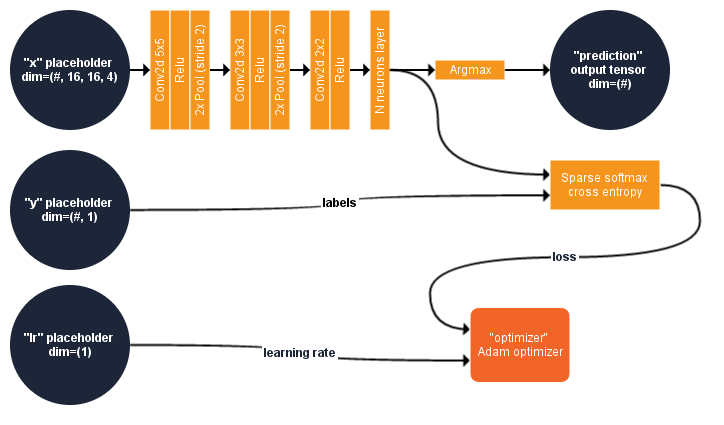
The network consist in two placeholders (“x” and “lr”) respectively used for input patches (4 dimensional array) and learning rate (single scalar), one output tensor (“prediction”, one dimensional array) and one target node (“optimizer”, used only for training the net). “#” means that the number of component for the first dimension is not fixed.
Important note: The functions used in our model are working on labels that are integers ranging from 0 to N-1 classes. The first class number must be 0 to enforce the class numbering convention of the TensorFlow functions used in our model.
To generate this model, just copy-paste the following into a python script named create_model1.py
You can also skip this copy/paste step since this python script is located here.
from tricks import *
import sys
import os
nclasses=6
def myModel(x):
# input patches: 16x16x4
conv1 = tf.layers.conv2d(inputs=x, filters=16, kernel_size=[5,5], padding="valid",
activation=tf.nn.relu) # out size: 12x12x16
pool1 = tf.layers.max_pooling2d(inputs=conv1, pool_size=[2, 2], strides=2) # out: 6x6x16
conv2 = tf.layers.conv2d(inputs=pool1, filters=16, kernel_size=[3,3], padding="valid",
activation=tf.nn.relu) # out size: 4x4x16
pool2 = tf.layers.max_pooling2d(inputs=conv2, pool_size=[2, 2], strides=2) # out: 2x2x16
conv3 = tf.layers.conv2d(inputs=pool2, filters=32, kernel_size=[2,2], padding="valid",
activation=tf.nn.relu) # out size: 1x1x32
# Features
features = tf.reshape(conv3, shape=[-1, 32], name="features")
# neurons for classes
estimated = tf.layers.dense(inputs=features, units=nclasses, activation=None)
estimated_label = tf.argmax(estimated, 1, name="prediction")
return estimated, estimated_label
""" Main """
if len(sys.argv) != 2:
print("Usage : <output directory for SavedModel>")
sys.exit(1)
# Create the TensorFlow graph
with tf.Graph().as_default():
# Placeholders
x = tf.placeholder(tf.float32, [None, None, None, 4], name="x")
y = tf.placeholder(tf.int32 , [None, None, None, 1], name="y")
lr = tf.placeholder_with_default(tf.constant(0.0002, dtype=tf.float32, shape=[]),
shape=[], name="lr")
# Output
y_estimated, y_label = myModel(x)
# Loss function
cost = tf.losses.sparse_softmax_cross_entropy(labels=tf.reshape(y, [-1, 1]),
logits=tf.reshape(y_estimated, [-1, nclasses]))
# Optimizer
optimizer = tf.train.AdamOptimizer(learning_rate=lr, name="optimizer").minimize(cost)
# Initializer, saver, session
init = tf.global_variables_initializer()
saver = tf.train.Saver( max_to_keep=20 )
sess = tf.Session()
sess.run(init)
# Create a SavedModel
CreateSavedModel(sess, ["x:0", "y:0"], ["features:0", "prediction:0"], sys.argv[1])The imported tricks.py is part of the OTBTF remote module, and contains a set of useful functions and helpers to create SavedModel . It is located in the OTBTF source code. The environment variable PYTHONPATH must hence contain the path to this directory to enable the use of tricks.py in our script. Our python script uses the TensorFlow python API to generate the model, and serializes it as a SavedModel (google protobuf) written on disk.
You can finally generate the SavedModel with:
python create_model1.py data/results/SavedModel_cnnTraining from scratch
If you take a look in the data/results/SavedModel_cnn directory, you will see a .pb file and a Variables folder. The protobuf file serializes the computational graph, and the Variables folder contains the values of the model weights (kernels, etc.). As you could have noticed in the python script, the model weights are initialized before exporting the SavedModel . We will use the TensorflowModelTrain application to train the CNN from its initialized state, updating its weights for the image classification task. For each dataset (training data and validation data), the validation step of the TensorflowModelTrain application consists in computing usual validation metrics.
Let’s quickly summarize the application parameters:
- training.source1 is a parameter group for the patches source (for learning)
- training.source1.il is the input image filename of the patches
- training.source1.patchsizex is the patch width
- training.source1.patchsizey is the patch height
- training.source1.placeholder is the name of the placeholder for the patches
- training.source2 is a parameter group the labels source (for learning)
- training.source2.il is the input image filename of the labels
- training.source2.patchsizex is the labels width
- training.source2.patchsizey is the labels height
- training.source2.placeholder is the name of the placeholder for the labels
- model.dir is the directory containing the TensorFlow SavedModel
- training.targetnodes is the name of the operator that we want to compute for the training step. In our model, the gradient descent is done with the adam optimizer node called “optimizer”.
- validation.mode is the validation mode. The “class” validation mode enables the computation of classification metrics for bot training data and validation data.
- validation.source1 is a parameter group for the patches source (for validation). As the name of the source for validation (validation.source1.name) is the same as the placeholder name of the same source for training (training.source1.placeholder), this source is considered as an input of the model, and is fed to the corresponding placeholder during the validation step.
- validation.source2 is the labels source (for validation). As the name of the source (validation. source2.name) is different than the placeholder name of the same source for training (training.source2.placeholder), this source is considered as a reference to be compared to the output of the model that have the same tensor name during the validation step.
- model.saveto enables to export the model variables (i.e. weights) to a file
The command line corresponding to the above description is the following:
# Train the deep learning model
otbcli_TensorflowModelTrain \
-training.source1.il Sentinel-2_B4328_10m_patches_A.tif \
-training.source1.patchsizex 16 \
-training.source1.patchsizey 16 \
-training.source1.placeholder "x" \
-training.source2.il Sentinel-2_B4328_10m_labels_A.tif \
-training.source2.patchsizex 1 \
-training.source2.patchsizey 1 \
-training.source2.placeholder "y" \
-model.dir "data/results/SavedModel_cnn" \
-training.targetnodes "optimizer" \
-validation.mode "class" \
-validation.source1.il Sentinel-2_B4328_10m_patches_B.tif \
-validation.source1.name "x" \
-validation.source2.il Sentinel-2_B4328_10m_labels_B.tif \
-validation.source2.name "prediction" \
-model.saveto "data/results/SavedModel_cnn/variables/variables"Run the TensorflowModelTrain application. After the epochs, note the kappa and overall accuracy indexes (should be respectively around 0.7 over the validation dataset). Browse the file system, and take a look in the data/results directory : you can notice that the application has updated two files :
variables.indexis a summary of the saved variables,variables.data-xxxxx-of-xxxxxis the saved variables (TensorflowModelTrain saved them only once at the end of the training process).
A quick comparison of scores versus Random Forest
Let’s use OTB to compare quickly the scores obtained using RF.
Here, we compare our tiny deep net to a Random Forest (RF) classifier. We use the metrics deriving from the confusion matrix. Let’s do it quickly thank to the machine learning framework of OTB First, we use the exact same samples as for the deep net training and validation, to extract the pixels values of the image :
# Extract the pixels values at samples locations (Learning data)
otbcli_SampleExtraction \
-in Sentinel-2_B4328_10m.tif \
-vec terrain_truth_epsg32654_A_pos.shp \
-field "class" \
-out terrain_truth_epsg32654_A_pixelvalues.shpThen, we do the same with the terrain_truth_epsg32654_B_pos.shp vector data (validation data). Finally, we train a RF model with default parameters:
# Train a Random Forest classifier with validation
otbcli_TrainVectorClassifier \
-io.vd terrain_truth_epsg32654_A_pixelvalues.shp \
-valid.vd terrain_truth_epsg32654_B_pixelvalues.shp \
-feat "value_0" "value_1" "value_2" "value_3" \
-cfield "class" \
-classifier "rf" \
-io.out randomforest_model.yaml
Compare the scores. The kappa index should be around 0.5, more than 20% less than our CNN model.
It’s not a surprise that the metrics are better with CNN than RF: The CNN uses a lot more information for training, compared to the RF. It learns on
16 × 16 patches of multispectral image, whereas the RF learns only on multispectral pixels (that could be interpreted as a 1 × 1 patches of multispectral image). So let’s not say that CNN is better than RF! The goal here is not to compare RF vs CNN, but just to show that the contextual information process by the CNN is useful in classification task. A more fair competitor could be a RF using spatial features like textures, local Fourier transforms, SIFTs, etc.
Create a landcover map
At least!
Updating the CNN weights
As explained before, the TensorFlow model is serialized as a SavedModel , which is a bundle including the computational graph, and the model variables (kernel weights). We have previously trained our model from scratch : we have updated its variables from their initial state, and saved them on the file system.
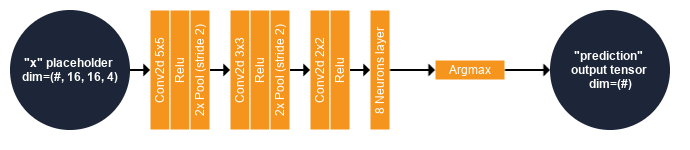
Running the model
Let’s run the model over the remote sensing image to produce a nice land cover map! For this, we will use the TensorflowModelServe application. We know that our CNN input has a receptive field of 16 × 16 pixels and the placeholder name is “x”. The output of the model is the estimated class, that is, the tensor resulting of the Argmax operator, named “prediction”. Here, we won’t use the optimizer node as it’s part of the training procedure. We will use only the model as shown in the following figure:
As we might have no GPU support for now, it could be slow to process the whole image. We won’t produce the map over the entire image (even if that’s possible thank to the streaming mechanism) but just over a small subset. We do this using the extended filename of the output image, setting a subset starting at pixel 1000, 4000 with size 1000 × 1000. This extended filename consists in adding ?&box=1000 :4000 :1000 :1000 to the output image filename. Note that you can also generate a small image subset with the ExtractROI application of OTB, then use it as input of the TensorflowModelServe application.
otbcli_TensorflowModelServe \
-source1.il Sentinel-2_B4328_10m.tif \
-source1.rfieldx 16 \
-source1.rfieldy 16 \
-source1.placeholder "x" \
-model.dir "data/results/SavedModel_cnn" \
-output.names "prediction" \
-out "classif_model1.tif?&box=4000:4000:1000:1000"
Where:
- source1 is a parameter group for the first image source,
- source1.il is the input image list of the first source,
- source1.rfieldx is the receptive field width of the first source,
- source1.rfieldy is the receptive field height of the first source,
- source1.placeholder is placeholder name corresponding to the the first source in the TensorFlow model,
- model.dir is the directory of the SavedModel ,
- output.names is the list of the output tensor that will be produced then generated as output image,
- out is the output image generated from the TensorFlow model applied to the entire input image.
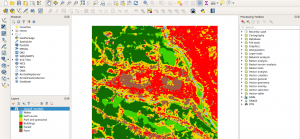
Now import the generated image in QGIS. You can change the style of the raster : in the layers panel (left side of the window), right-click on the image then select properties,and import the provided legend_style.qml file.
Important note: We just have run the CNN in patch-based mode, meaning that the application extracts and process patches independently at regular intervals. This is costly, because the sampling strategy requires to duplicate a lot of overlapping patches, and process them independently. The TensorflowModelServe application enables to uses fully convolutional models, enabling to process seamlessly entire output images blocks... but that's also another story!
Conclusion
This tutorials has explained how to perform an image classification using a simple deep learning architecture.
The OTBTF, a remote module of the Orfeo ToolBox (OTB), has been used to process images from a user’s perspective: no coding skills were required for this tutorial. QGIS was used for visualization purposes.
We will be at IGARSS 2019 for a full day tutorial extending this short introduction, and we hope to see you there!
Want more? To go further (multi-branch models, fully-convolutional models, semantic segmentation models, …) we encourage the reader to check the OTBTF documentation section, which provides some ready-to-use deep networks, with documentation and scientific references.
Edit 22/07/2020
I am happy to announce the release of my book “Deep learning for remote sensing images with open-source software” on Taylor & Francis (https://doi.org/10.1201/9781003020851). The book extends significantly this tutorial, keeping the same format. It contains further sections to learn how to apply patch-based models, hybrid classifiers (Random Forest working on Deep learning features), Semantic segmentation, and Image restoration (Optical images gap filling from joint SAR and time series).
Bibliography
[1] R. Cresson, A Framework for Remote Sensing Images Processing Using Deep Learning Techniques. IEEE Geoscience and Remote Sensing Letters, 16(1) :25-29, 2019.
[2] Liangpei Zhang, Lefei Zhang, and Bo Du. Deep learning for remote sensing data : A technical tutorial on the state of the art. IEEE Geoscience and Remote Sensing Magazine, 4(2) :22–40, 2016.
[3] Diederik P Kingma and Jimmy Ba. Adam : A method for stochastic optimization. arXiv preprint arXiv :1412.6980, 2014.